















 2 / 12
2 / 12

wave generator, two pairs of gear rims of a hard and flexible wheel gear providing the
wave gear coupling. As a result, we offer the design methods, which include contact
ratio, the stops, the torque on the output shaft, durability, strength characteristics
of the flexible wheel and other quality characteristics. Application of these methods
makes it possible to design an advance intermittent motion mechanism.
Keywords
:
intermittent motion mechanism, wave gear, a disk wave generator, flexible
and hard gear wheels, wave engagement, wave gear coupling.
Для обеспечения движения выходного звена с остановами наибо-
лее часто используются многозвенные рычажные механизмы, храпо-
вые и анкерные механизмы, мальтийские, звездчатые механизмы, а
также шаговые электродвигатели. Недостатком рычажных механиз-
мов является сложность подбора длин звеньев и их сочетаний и, как
следствие, — неточность воспроизведения заданного закона движения
и слишком большие габаритные размеры [1, 2]. Храповые и мальтий-
ские механизмы характеризуются движением с ударами в начале или в
конце фазы прерывистого движения, а также неточностью воспроизве-
дения заданного закона движения из-за зазоров в кинематических па-
рах, которые возникают из-за повышенного износа вследствие трения
скольжения [3, 4]. К недостаткам шаговых электродвигателей отно-
сится низкая точность под нагрузкой из-за проскальзывания ротора и
отсутствия обратной связи по числу шагов, низкая удельная мощность
и склонность к резонансам [1–3].
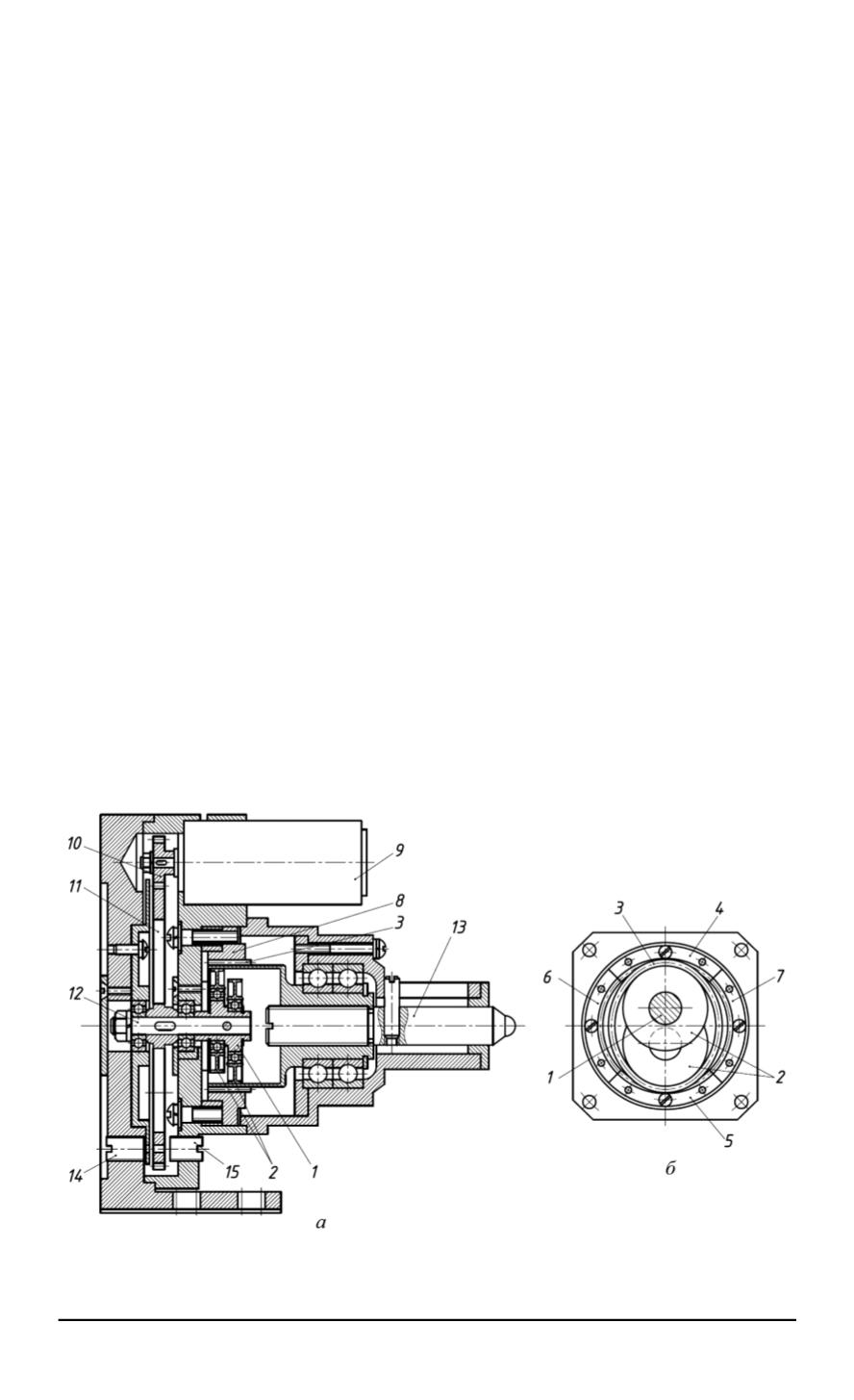
В качестве альтернативных более эффективных механизмов пред-
лагается использовать зубчатые передачи прерывистого действия, в
частности шаговую волновую зубчатую передачу (ВЗП) (рис. 1,
б
), ко-
торая была разработана на кафедре “Теории механизмов и машин”
Рис. 1. Привод дискретного позиционирования (
а
) и шаговая ВЗП (
б
)
114 ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. “Машиностроение”. 2016. № 2