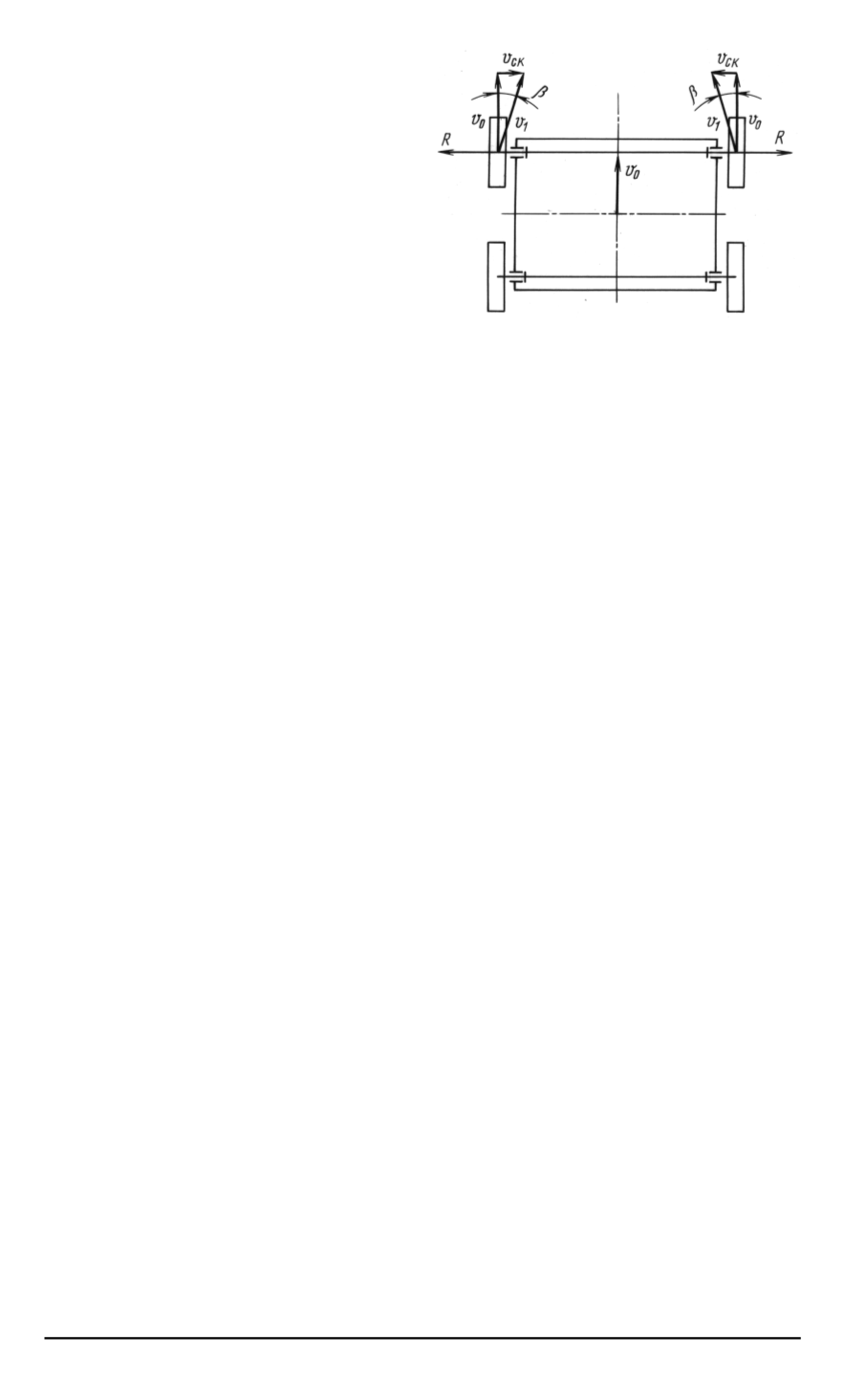
Рис
. 1.
Схема
,
поясняющая механизм
возникновения поперечного упругого
скольжения
в противоположные стороны на
некоторые малые и равные углы
β
,
а центры тележек и всех колес
движутся с постоянной скоростью
ˉ
V
0
.
Окружная скорость
ˉ
V
1
переко
-
шенных колес и скорость центров
колес связаны векторным соотно
-
шением
ˉ
V
0
= ˉ
V
1
+ ˉ
V
ск
,
где
ˉ
V
ск
—
скорость упругого сколь
-
жения
.
Вследствие относительного скольжения на перекошенные колеса в
поперечном направлении со стороны поверхности качения действуют
силы
,
величины которых
,
согласно теории упругого скольжения
,
опре
-
деляются соотношением
:
R
=
−
Kβ,
где
K
—
коэффициент пропорциональности
,
зависящий от механиче
-
ских характеристик контактирующих тел и их геометрических параме
-
тров
.
Максимальная величина поперечной силы
R
,
как известно
,
равна
R
max
=
Gf
(
G
—
вертикальная нагрузка на колесо
,
f
—
коэффици
-
ент трения
),
а при некотором максимальном угле перекоса колес
β
max
ее можно определить по формуле
:
R
max
=
Kβ
max
.
Отсюда становится очевидным
,
что в пределах
0
< β < β
max
пере
-
кошенные колеса находятся в зоне упругого скольжения
.
Кроме поперечной силы
R
,
при этом возникает момент
,
стремящий
-
ся вернуть колесо в положение
,
когда угол
β
= 0
.
Однако этот момент
имеет малую величину
,
и в динамических расчетах им обычно прене
-
брегают
[6].
Впервые на явление упругого скольжения обратил внимание О
.
Рей
-
нольдс в
1875
г
.,
который качественно установил
,
что катящееся веду
-
щее колесо тележки проходит по рельсовому пути за один оборот коле
-
са путь несколько меньший
,
чем длина его окружности
.
Количествен
-
ная оценка эффекта упругого скольжения оказалась весьма трудоемкой
.
Используя результаты решения плоской контактной задачи со сдвигом
ISSN 0236-3941.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Машиностроение
”. 2005.
№
2 119


