Рис
. 2.
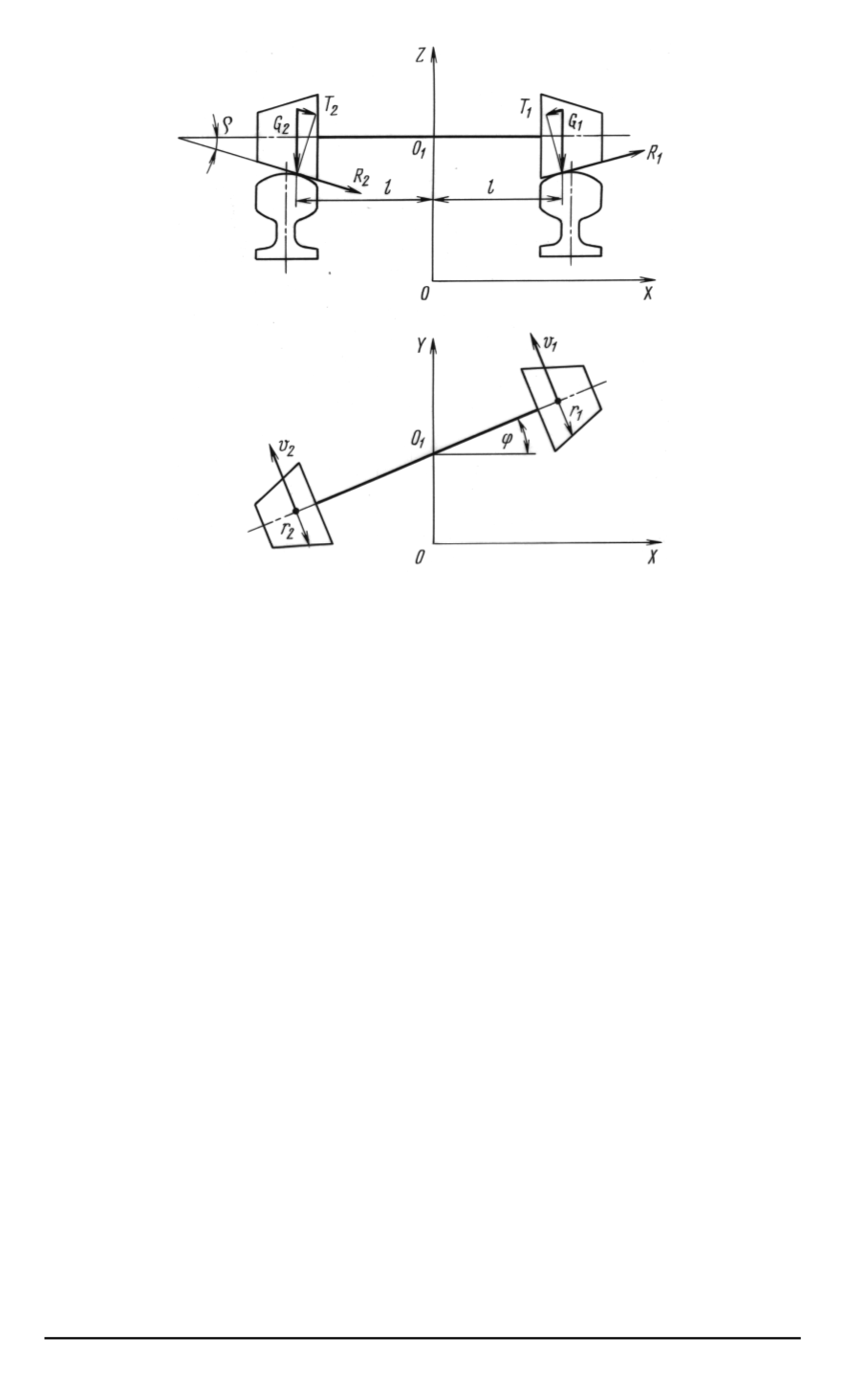
Схема железнодорожного конического ската
,
движущегося по прямоли
-
нейному рельсовому пути
O
1
)
равноудален от точек контакта с рельсами
;
ρ
—
угол конусности
ската
(
обычно
tg
ρ
= 0
,
05
).
Ориентация ската в пространстве определя
-
ется системой координат
0
XY Z
.
Поворот оси ската в горизонтальной
плоскости определяется углом
ϕ
.
На колеса ската действуют соответственно силы веса
G
1
=
G
2
и си
-
лы упругого скольжения
R
1
и
R
2
,
положительные направления которых
выбраны в соответствии с направлением оси
X
.
Проекции сил веса ко
-
лес на образующие конуса ската назовем силами действия уклона
(
T
1
,
T
2
)
.
В исходном положении ската
T
1
=
G
1
u
,
T
2
=
G
2
u
,
где
u
= tg
ρ
.
При отсутствии поворота ската на угол
ϕ
сместим его центр на ма
-
лую величину
x
.
Тогда радиусы качения колес
r
1
=
r
0
+
ux
,
r
2
=
r
0
−
ux
,
а вследствие подъема первого колеса на величину
ux
и опускания вто
-
рого колеса на величину
ux
,
силы действия уклона станут равными
T
1
=
G
1
(
u
+
ux/l
)
,
T
2
=
G
2
(
u
−
ux/l
)
.
Повернем теперь ось ската в горизонтальной плоскости на малый
угол
ϕ
и составим выражения для сил
R
1
и
R
2
.
Согласно теории упруго
-
го скольжения
R
1
=
−
Kη
1
,
R
2
=
−
Kη
2
,
где
K
—
коэффициент упруго
-
го скольжения
;
η
1
,
η
2
—
относительные скорости упругого скольжения
колес
,
определяемые соотношениями
:
η
1
= (
x
−
v
ск
1
x
)
/
˙
y, η
2
= (
x
−
v
ск
2
x
) ˙
y
;
ISSN 0236-3941.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Машиностроение
”. 2005.
№
2 121


