














 12 / 18
12 / 18

В.А. Горелов, Б.В. Падалкин, О.И. Чудаков
132
ISSN 0236-3941. Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2017. № 2
ние по оси
Z
от оси колес полуприцепа до ССУ и сцепного устройства соответ-
ственно.
Продольная составляющая связи тягача и полуприцепа реализуется через
силу на крюке, которая вычисляется по следующей зависимости [11]:
кр
1
2 0
1
2 0
,
с
с
x
x
P X X C V V B
где
C
0
— коэффициент жесткости сцепного устройства в продольном направле-
нии;
B
0
— коэффициент сопротивления демпфера сцепного устройства в про-
дольном направлении;
X
с
1
и
X
с
2
— координата по оси
Х
центра масс тягача и по-
луприцепа.
Выбор коэффициентов
C
0
и
B
0
основан на рекомендациях, приведенных в [12].
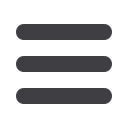
Разработанная математическая модель реализована в среде имитационного
математического моделирования динамических систем Simulink программного
комплекса MATLAB. Блок-схема модели (рис. 8,
а
) включает в себя четыре основ-
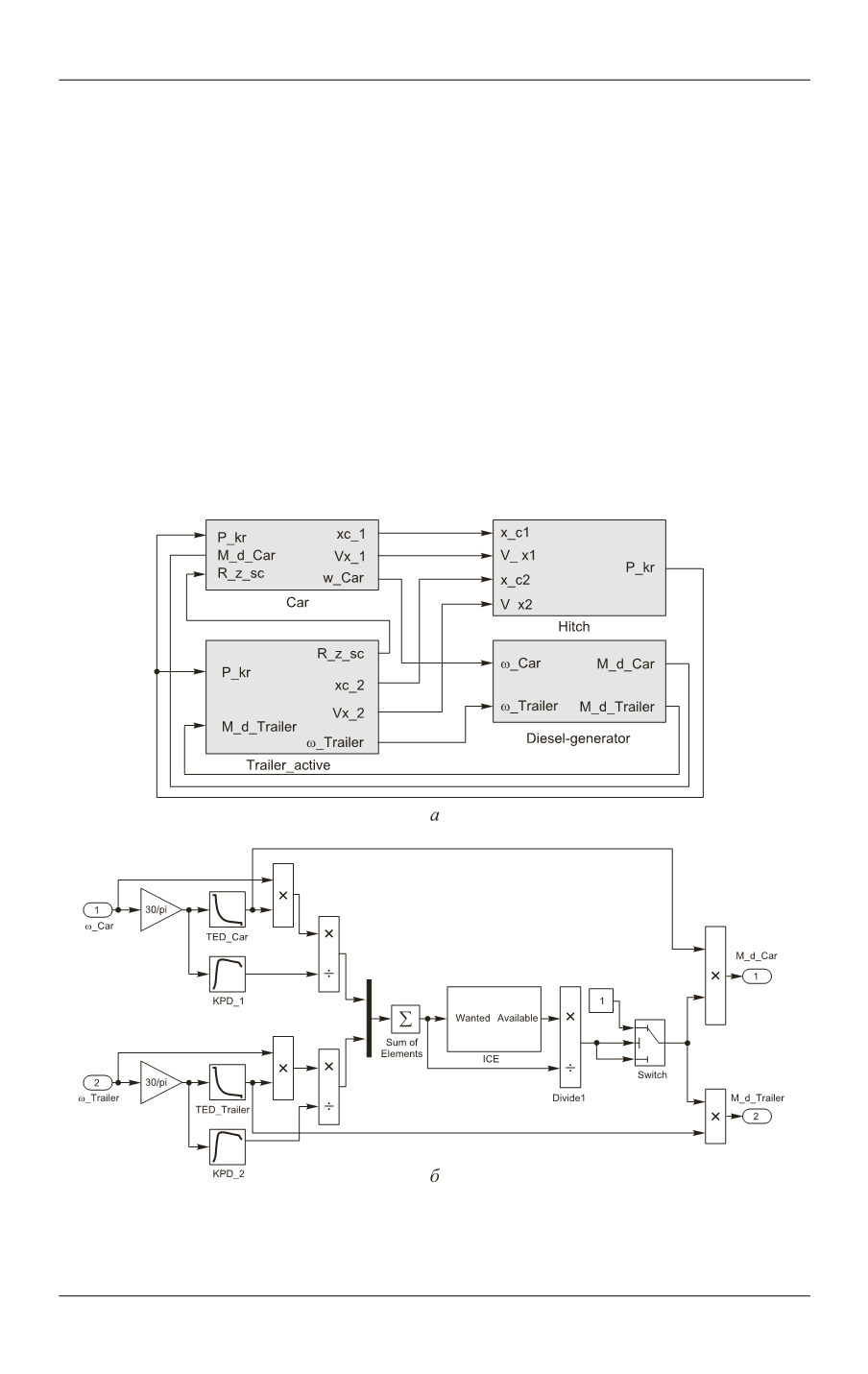
Рис. 8.
Блок-схемы математической модели движения седельного автопоезда (
а
) и
дизель-генераторной установки (
б
)